 Кому-то этот вопрос может показаться странным, ведь ответ скрыт в их названии — реле положения включено/отключено. Но если вы думаете, что эти реле сообщают о текущем положении выключателя, то читайте дальше. Потому, что ответ неверный.
Кому-то этот вопрос может показаться странным, ведь ответ скрыт в их названии — реле положения включено/отключено. Но если вы думаете, что эти реле сообщают о текущем положении выключателя, то читайте дальше. Потому, что ответ неверный.
Чтобы правильно ответить на этот вопрос нужно рассмотреть стандартную схему подключения привода силового выключателя, например, на 35 кВ. Реле РПВ (KQC) и РПВ (KQT) выделены красным цветом.
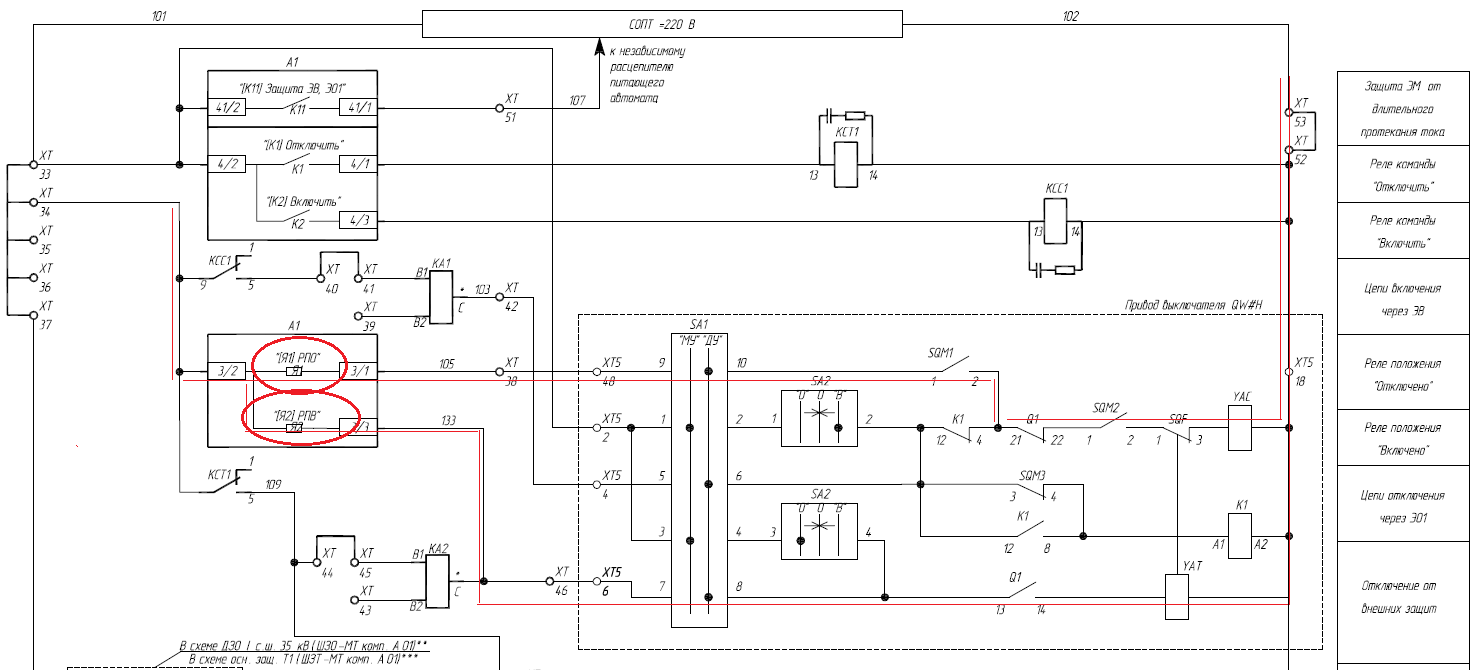
Рис.1. Схема подключения привода вакуумного выключателя 35 кВ (пример)
А вот еще одна схема, на этот раз для выключателя 110 кВ
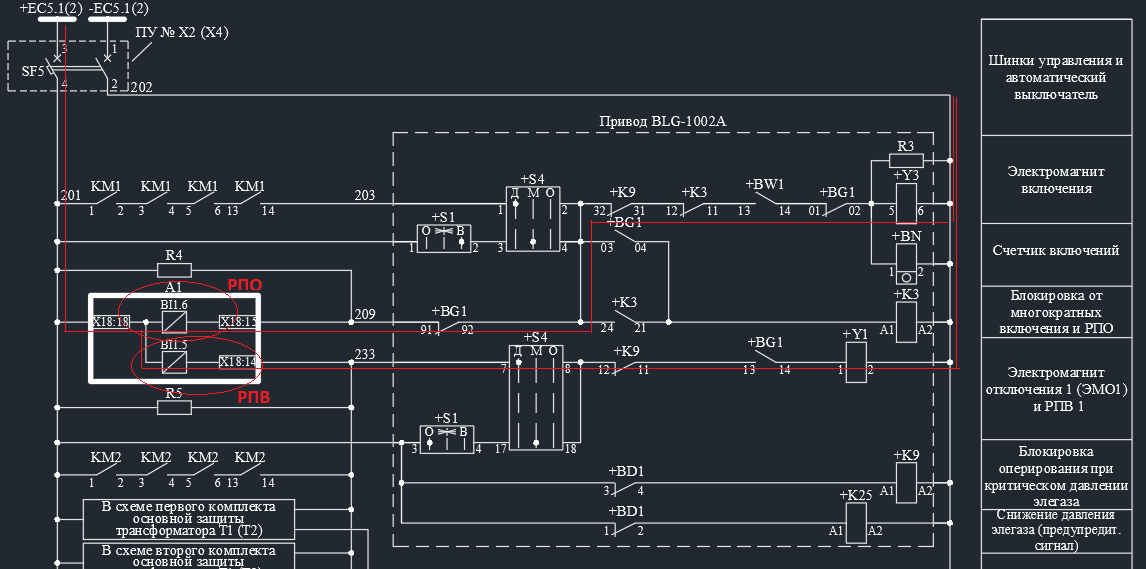
Рис.2. Схема подключения привода элегазового выключателя 110 кВ (пример)
Как видно питание на катушки данных реле (особенно РПО) подаются по достаточно длинным цепочкам, включающим другие контакты и электромагниты включения отключения.
Естественно в этих цепочках присутствуют блок-контакты выключателя, однако не только они. В общем случае сюда могут быть включены концевик контроля взвода пружины, контакты реле контроля давления элегаза (блокирующая ступень) и т.д. Именно поэтому реле РПВ и РПО не могут сигнализировать о текущем положении выключателя.
Что же тогда “показывают” РПО и РПВ?
Они указывают на готовность привода к операции:
РПО – готовность к операции включения,
РПВ – готовность к операции отключения.
Давайте посмотрим на цепь включения на Рис.1, в которую входит РПО. Помимо блок-контакта выключателя Q1 и катушки включения YAC в нее входят следующие элементы:
— Переключатель SA1 в шкафу привода, который переводит привод в дистанционное или местное (ремонтное) управление. Для питания входа РПО требуется, чтобы переключатель стоял в положении ДУ, иначе сигнал не пройдет.
— Контакты контроля состояния пружины привода SQM1 и SQM2, которые замыкаются, когда пружина взведена, т.е. когда выключатель готов к операции включения. После каждого включения пружина привода разряжается, и контакты SQM размыкаются, блокируя прохождение команды включения до окончания взвода пружины.
— Контакт SQF, который разрывает цепь включения, если есть параллельная команда отключения выключателя для того, чтобы не было эффекта многократного включения.
Если хоть один из этих элементов находится в разомкнутом состоянии, то цепь РПО не соберется, даже если выключатель будет находиться в отключенном положении (Q1 замкнут). Совокупность всех этих элементов указывает на готовность/неготовность выключателя к операции включения.
Если выключатель элегазовый, то в цепи включения и отключения добавляются контакты реле давления элегаза, которое полностью блокирует управления при критическом снижении давления. Это предотвращает отказ выключателя при КЗ из-за невозможности погасить дугу (нет элегаза — нет среды гашения). Такое реле можно увидеть на Рис.2 (+К9)
Также реле/входы РПО или РПВ не будут запитываться при обрыве цепей включения и отключения или отключении автомата питания. При исчезновении обоих сигналов РПВ и РПО устройство РЗА выдает предупредительный сигнал дежурному на подстанции или в АСУ.
Изначально именно для контроля целостности цепей управления выключателя эти реле и применялись.
Особенности использования сигналов РПВ и РПО в логических схемах
Обработку сигналов РПО, РПВ нужно производить с учетом логики их образования.
Например, сигнал РПО может исчезнуть на время взвода пружины, особенно в цикле неуспешного АПВ (операция О-tапв-ВО), когда происходит повторное отключение устойчивого КЗ, но пружина включения еще не успела зарядиться.
Время заводки пружины может достигать 15 с (ВВУ-СЭЩ-П-10) и более, особенно при пониженном напряжении оперативного тока.
Это означает, что выполнять сигнализацию обрыва цепей привода (одновременное исчезновение РПО и РПВ) нужно обязательно с выдержкой времени не менее времени взвода пружины.
Сигналы РПВ также широко используется в алгоритмах защит и автоматики. Например, РПВ обычно применяют при пуске АПВ, а РПО при ускорении защит.
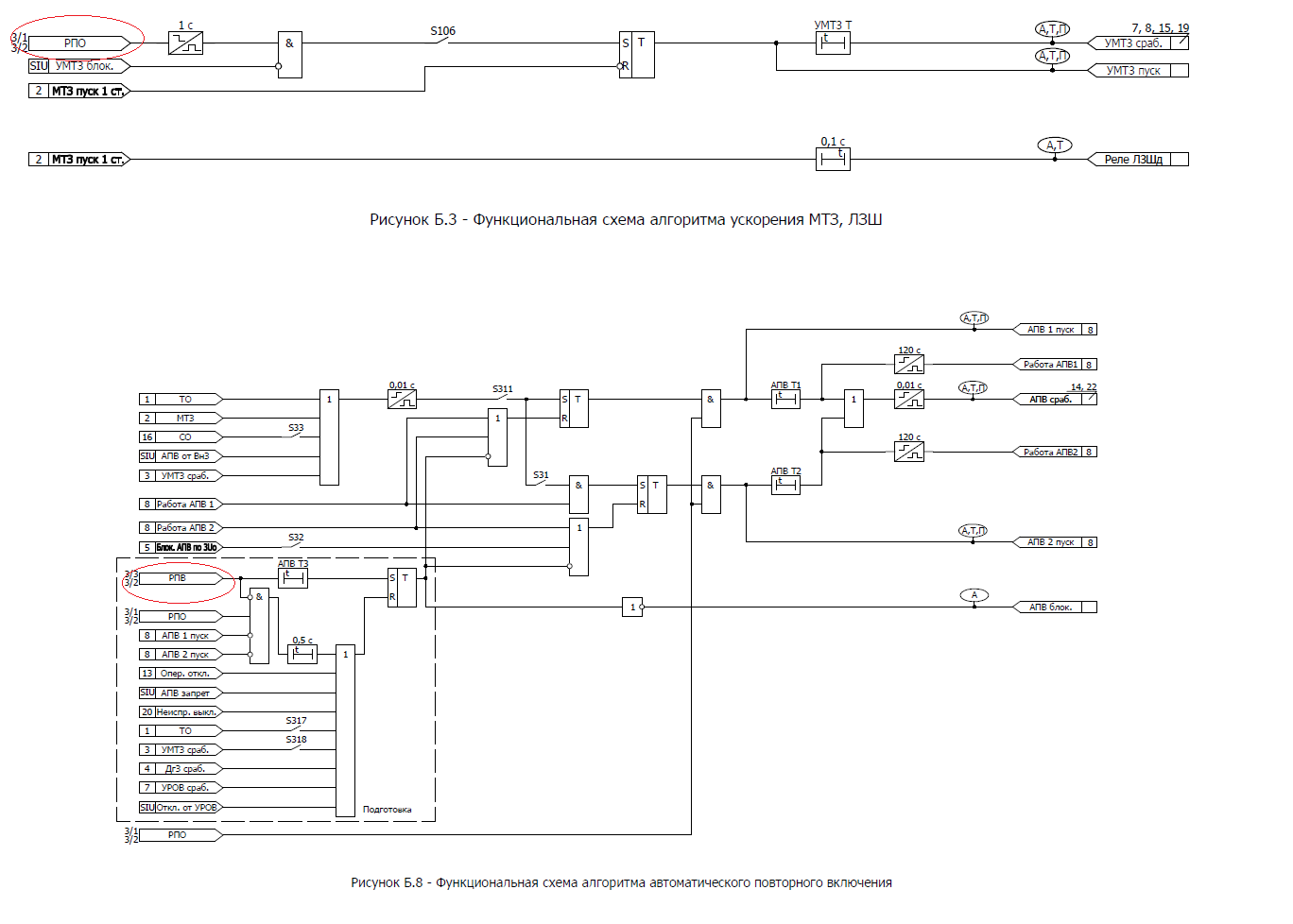
Рис. 3. Использование РПВ и РПО в алгоритмах МП РЗА (на примере БМРЗ-152-КЛ, взяты с сайта http://mtrele.ru)
Кроме того, нужно понимать, что даже если все вспомогательные контакты замкнуты все равно некорректно судить о положении выключателя по РПО и РПВ потому, что в этом случае сигналы РПО и РПВ исчезают быстрее, чем происходит полная операция включения/отключения.
Например, сигнал РПВ (Рис.1) исчезнет на дискретном входе терминала А1 сразу, как только будет выдана команда на отключение контактом реле KCT1. Т.е. выключатель еще не успел отключиться (еще включен), а сигнал РПВ уже исчез (вход РПВ зашунтирован контактом реле KCT1).
Разница здесь конечно небольшая (десятки миллисекунд), но для таких систем как РАС и АСУ может быть существенна. Поэтому для них положение выключателя нужно “забирать” через “сухие” блок-контакты выключателя, при питании от опертока соответствующей системы.
Именно блок-контакт выключателя с показывает его текущее положение, а РПВ и РПО – это реле контроля готовности выключателя к соответствующей операции.
Ну, и напоследок небольшое наблюдение
В последнее время проектировщики и производители выключателей стараются вынести цепь РПО как можно дальше к электромагниту включения, минуя всю сложную цепочку вспомогательных контактов.
На Рис. 4 показаны две схемы на приводы однотипных выключателей ВВУ-СЭЩ-П с разницей в 3 года. Слева вы видите схему от 2010 года, а справа более современную. Обратите внимание на цепь РПО – это то, о чем я говорил. В первом случае вы контролируете почти всю цепь включения, а во втором только участок Q1-YAC.
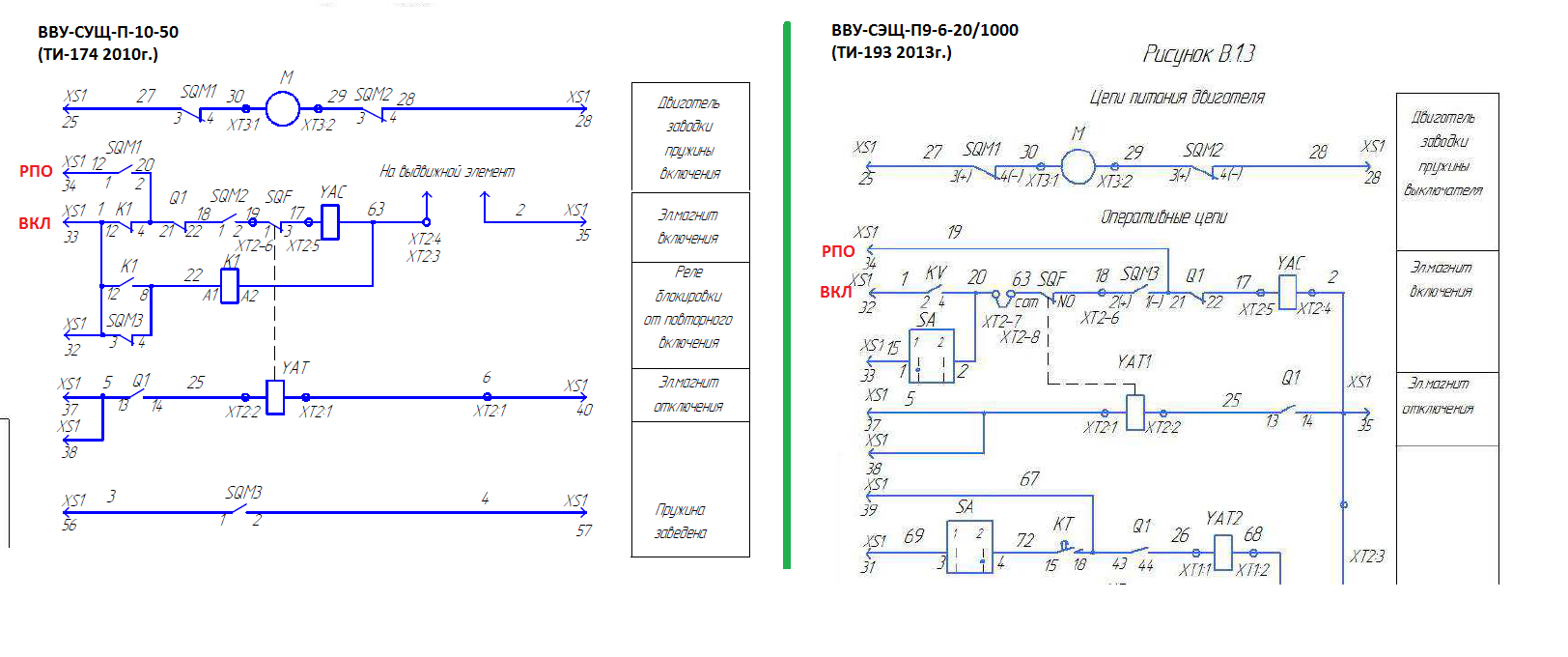
Рис. 4. Сравнение схем подключения пружинных приводов ВВУ-СЭЩ-П (схемы взяты с сайта https://electroshield.ru)
С одной стороны, исключив множество доп. контактов из цепи формирования РПО, вы несколько упрощаете логику работы автоматики (в нашем примере не нужно оглядываться на работу пружины), но при этом вы теряете возможность контролировать цепь включения.
Если в правой схеме обрыв произойдет до цепи 19 вы никак об этом не узнаете, пока не попробуете включить выключатель. Это минус.
Я бы применял именно левую схему подключения РПО, подстраивая логику АУВ под полную цепочку включения, а как бы поступили вы?
Если понравилась статья, то плюсуйте карму и пишите комментарии. Тогда мы продолжим разбор цепей привода выключателя и логики работы автоматики управления.
Всего хорошего!
Спасибо что затронули такую тему, действительно левая схема более предпочтительна. А вот с блок-контактами тоже можно неприятность получить. (Из личного опыта),к сожалению бывает так, что при включении блок-контакты не разворачиваются, т.е. остаются в таком положении что терминал не видит окончания операции (детская болезнь, люфты в тягах). А если это включение на КЗ (даже и без АПВ),терминал конечно команду на отключение выдаст, но дойдет ли она до отключающей катушки? В итоге неселективное отключение вышестоящей защитой? Поправьте пожалуйста если не прав.
Да, если блок-контакты не перекинулись, то цепь отключения не подготовится и будет либо действие УРОВ (если оно есть), либо отключение вышестоящими.
Но я чаще слышал, что как раз заклинивает привод, а не проворачиваются БК. В этом случае, если у терминала нет функции подхвата команды по фиксации РПВ/РПО или от протекающего тока, его выходной контакт может сгореть при попытке разорвать цепь управления. Особенно если привод на постоянном токе. Наверное следующая статья по приводам будет об этом
Спасибо очень интересно жду следующую статью. В моем случае правда КЗ не было, но и отключить (дистанционно) не получилось. Лишь после того как вручную довел БК выключатель отключился. Сириус-Л держал команду на отключение примерно 3-5 мин. и к счастью не повредился.
На вопрос какая схема предпочтительней, левая или правая, однозначно ответить невозможно. С одной стороны, левая действительно более «каноническая» и соответствует тому, чему и посвящена статья, т.е. тому, что реле РПО и РПВ это реле готовности к соответствующим коммутационным операциям. С другой стороны, при построении РЗиА на современной микропроцессорной базе нет прямой необходимости собирать все условия готовности к включению и отключению в одной цепочке. Ничто не мешает вывести сигналы взвода пружины, либо датчиков давления элегаза на отдельные входы терминалов, включить их уже не в физические, а в логические цепочки, назначить им сигналы, определить им информационные сообщения и пр. При большом количестве элементов в цепи РПО, в случае отказа какого-либо элемента, в общем случае, вы не будете знать где именно отказ, но функция РПО как реле готовности будет выполнена на 100%. Исключив «лишние» элементы из цепи РПО, но заведя их напрямую в терминал отдельными дискретами, вы не потеряете функционал РПО, если обеспечите те же блокирующие логические взаимосвязи. По моему мнению, надо исходить из особенности работы конкретных приводов выключателей, отталкиваясь изначально от схемы слева, исключая, в обоснованных случаях, её элементы, так сказать, «физически», но не логически .
Денис, если так сделать вы не сможете выполнять главное — контролировать цепи управления на обрыв.. это особенно важно для цепи отключения.. все остальное (пружина, элегаз) действительно можно контролировать отдельными входами терминала.. правда с элегазом есть еще одна нехорошая особенность — если контакт реле один и он отправляется на терминал, а не в цепи управления, то кто заблокирует отключение мимо терминала, от ключа управления? Такое отключение в обход терминала требуют некоторые заказчики, хотя я это нет поддерживаю